 EV
EV



 Veňil ulag
Veňil ulag



 Mpv
Mpv
 Sedan
Sedan
 Van
Van



Gözleg we gözleg ukyby
Ulag derejesindäki platformalary we ulgamlary dizaýn etmäge we ösdürmäge, ulag synagyny geçirmäge ukyply boluň;IPD önüminiň toplumlaýyn ösüş prosesi ulgamy, gözleg-barlag işleriniň hilini üpjün etmek we gözleg-agtaryş siklini gysgaltmak bilen gözleg we barlag işleriniň dowamynda sinhron dizaýny, ösüşi we barlagy gazandy.
Gözleg we ösüş innowasiýalarynyň göterijisi hökmünde R&D institutlary bilen hemişe "müşderi merkezi, islege esaslanýan önüm öndürmek" ösüş modeline eýerýäris we iş ýerimizi giňeltmek üçin tehnologiki markalara üns berýäris.Häzirki wagtda ulag derejesindäki platformalary we ulgamlary dizaýn etmek we ösdürmek, ulagyň öndürijiligini dizaýn we ösdürmek, ylmy we tehnologiki täzelikleri inkubasiýa etmek we ulagyň öndürijiligini barlamak ukybymyz bar.Gözlegiň we ösüşiň hilini netijeli üpjün etmek we gözleg we ösüş siklini gysgaltmak, önümi ösdürmegiň ähli prosesinde sinhron dizaýny, ösüşi we barlagy gazanmak üçin IPD önümi integrasiýa ösüş ulgamyny hödürledik.
Gözleg we dizaýn mümkinçilikleri
Awtoulag dizaýny we ösüşi:Öndürijilige esaslanan toplumlaýyn ösüş ulgamyny we önüm platformasynyň arhitekturasyny dörediň, içerde we halkara derejede ösen sanly dizaýn gurallaryny we V görnüşli ösüş proseslerini ulanyň, önümi ösdürmegiň barşynda sinhron dizaýny, ösüşi we barlagy, gözlegleriň we ösüşiň hilini netijeli üpjün ediň we gysgaldyň gözleg we ösüş sikli.
Simulýasiýa derňew ukyby:Sekiz ölçegde simulýasiýa ösüş mümkinçiliklerine eýe bolmak: gurluş berkligi we berkligi, çaknyşmagyň howpsuzlygy, NVH, CFD we ýylylyk dolandyryşy, ýadawlygyň çydamlylygy we köp beden dinamikasy.Performanceokary öndürijilik, çykdajy, agram balansy, simulýasiýa we synag synag takyklygy bilen wirtual dizaýn we barlamak mümkinçiliklerini dörediň
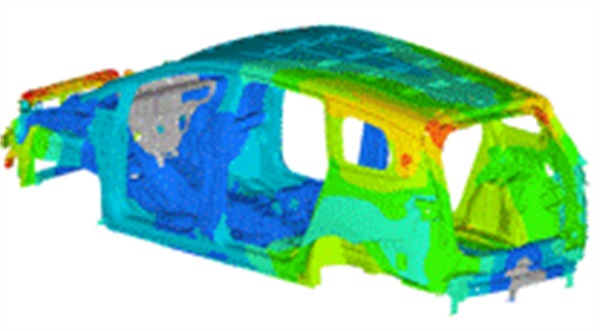
NVH derňewi
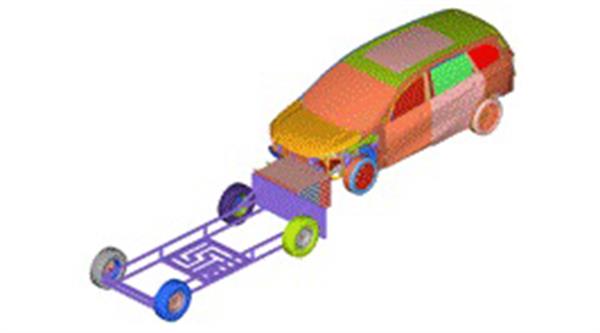
Çaknyşygyň howpsuzlygy derňewi
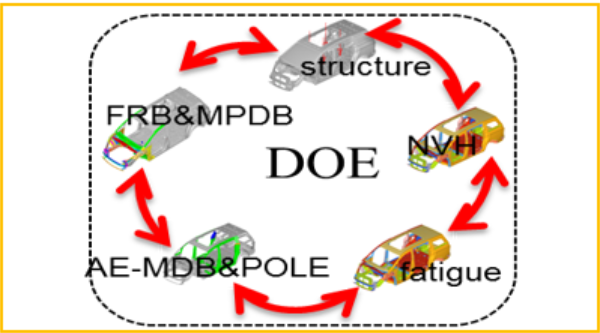
Köp dersli obýektiw optimizasiýa
Synag ukyby
Gözleg we synag merkezi Liudong täjirçilik awtoulag bazasynda ýerleşýär, gurluşyk meýdany 37000 inedördül metr we birinji etapda 120 million ýuana maýa goýulýar.Awtoulag zyňylyşy, çydamly deprek, NVH ýarym aneko kamerasy, komponent synagy, elektron we elektrik komponentleri EMC, täze energiýa we ş.m. ýaly köp sanly giň gerimli barlaghanalary gurdy. Synag programmasy 4850 elemente çenli giňeldildi we gurşaw derejesi ulagyň synag kuwwaty 86,75 göterime çenli ýokarlandy.Awtoulagyň dizaýny, ulag synagy, şassi, beden we komponent synag mümkinçilikleri emele geldi.

Awtoulag daşky gurşawyň zyňyndy synag synaghanasy

Ulag ýollaryny simulýasiýa barlaghanasy

Awtoulag ýollarynyň zyňyndy synag otagy
Önümçilik ukyby
Gözleg we synag merkezi Liudong täjirçilik awtoulag bazasynda ýerleşýär, gurluşyk meýdany 37000 inedördül metr we birinji etapda 120 million ýuana maýa goýulýar.Awtoulag zyňylyşy, çydamly deprek, NVH ýarym aneko kamerasy, komponent synagy, elektron we elektrik komponentleri EMC, täze energiýa we ş.m. ýaly köp sanly giň gerimli barlaghanalary gurdy. Synag programmasy 4850 elemente çenli giňeldildi we gurşaw derejesi ulagyň synag kuwwaty 86,75 göterime çenli ýokarlandy.Awtoulagyň dizaýny, ulag synagy, şassi, beden we komponent synag mümkinçilikleri emele geldi.

Marka
Marka ussahanasynda bir sany doly awtomatiki örtük we boş çyzyk we umumy tonnasy 5600T we 5400T bolan iki sany doly awtomatiki möhürleme önümçilik liniýasy bar.Bir gapdalynda 400000 birlik önümçilik kuwwaty bolan gapdal paneller, ýokarky gapaklar, penjireler we maşyn örtükleri ýaly daşarky panelleri öndürýär.

Kebşirleýiş prosesi
Bütin setir awtomatlaşdyrylan transport, NC çeýe ýerleşiş, lazer kebşirlemek, awtomatiki ýelimlemek + wizual gözden geçirmek, robot awtomatiki kebşirlemek, onlaýn ölçeg we ş.m. ýaly robotlary ulanmagyň tizligi 89% -e çenli ýokary tehnologiýalary kabul edýär, köpleriň çeýe sazlaşyklylygyny gazanýar. ulagyň modelleri.


Tingiwopis prosesi
Lineurduň içinde öňdebaryjy bir gezeklik goşa reňkli ulag liniýasyny geçmek üçin tamamlaň;
100% robot awtomatiki pürkmek bilen, ulag korpusynyň poslama garşylygyny gowulandyrmak üçin katod elektroforez tehnologiýasyny kabul etmek.

FA prosesi
Çarçuwa, korpus, dwigatel we beýleki esasy gurnamalar howa geçiriji awtomatiki geçiriş ulgamyny kabul edýärler;Modully gurnama we doly integrirlenen logistika re modeimini kabul edip, AGV akylly awtoulag gowşurylyşy onlaýn işe girizilýär we Anderson ulgamy hil we netijeliligi ýokarlandyrmak üçin ulanylýar.
Şol bir wagtyň özünde, ERP, MES, CP we ş.m. ýaly ulgamlara esaslanýan maglumat tehnologiýalaryny ulanmak, iş proseslerini täzeden gurmak, prosesiň aýdyňlygyny we wizuallaşdyrylmagyny gazanmak we önümçiligiň netijeliligini ep-esli ýokarlandyrmak üçin
Modellemek ukyby
Processhli proses dizaýnyny we 4 A derejeli taslama modellemesini ösdürmäge ukyply boluň.
4000 inedördül metr meýdany tutýar
VR gözden geçiriş otagy, ofis meýdany, modelleri gaýtadan işlemek otagy, koordinat ölçeg otagy, açyk gözden geçiriş otagy we ş.m. bilen gurlan, A prosessli dört taslama dizaýnynyň doly proses dizaýnyny we ösüşini amala aşyryp biler.


